New publication in Biological Cybernetics
We are pleased to share a new publication from the group in Biological Cybernetics, presenting further advances in understanding how insects control movement and posture using distributed sensory information.
From local sensing to coordinated movement
In this study, led by Thomas van der Veen in collaboration with Volker Dürr and Elisabetta Chicca, the researchers investigate how insects may build an internal representation of their own body using only local sensory signals.
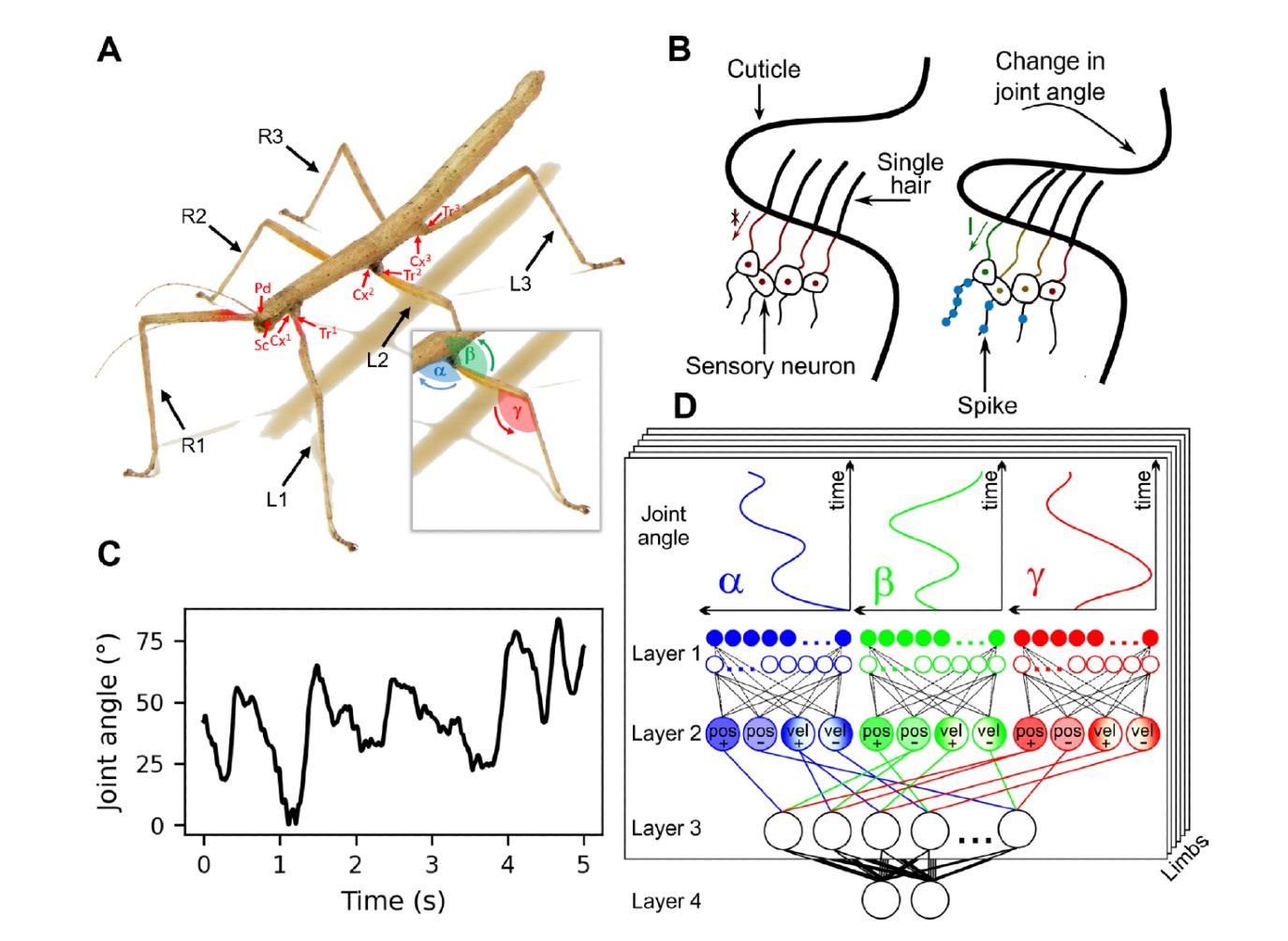
Unlike vertebrates, insects lack a dedicated organ to sense body posture. Instead, they rely on distributed proprioceptive inputs from their legs. The team developed a multi-layer spiking neural network model that shows how these local signals can be combined to encode both movement primitives—basic building blocks of motion—and overall body posture.
The results demonstrate that higher-level neural representations can emerge from simple, local inputs. The model successfully captures key aspects of insect locomotion, including step cycle phases, transitions such as leg lift-off, and even body pitch during climbing.
A companion to earlier work
This publication builds directly on a companion paper that introduced how joint angles and velocities can be encoded by local sensory neurons. Together, the two studies provide a comprehensive framework: from low-level sensory encoding to higher-level representations of coordinated movement and posture.
By validating the model against experimental data from freely moving stick insects, the work strengthens the hypothesis that insects can derive complex motor control from distributed, relatively simple neural mechanisms.
Implications for neuroscience and robotics
The findings contribute to a deeper understanding of biological motor control and offer inspiration for bio-inspired robotics. Systems based on similar principles could achieve robust and adaptive locomotion while remaining computationally efficient.
This research highlights how complex behaviour can arise from compact neural systems—an idea that continues to guide the development of neuromorphic technologies and intelligent machines.