Assessing impacts of autonomous vehicles on material and environmental sustainability | Yanru Pu

Field | Discipline
-
Autonomous vehicle
-
Rebound effect
-
Environmental sustainability
Expertise
-
Environmental life cycle assessment
-
Vehicle energy modeling
Summary
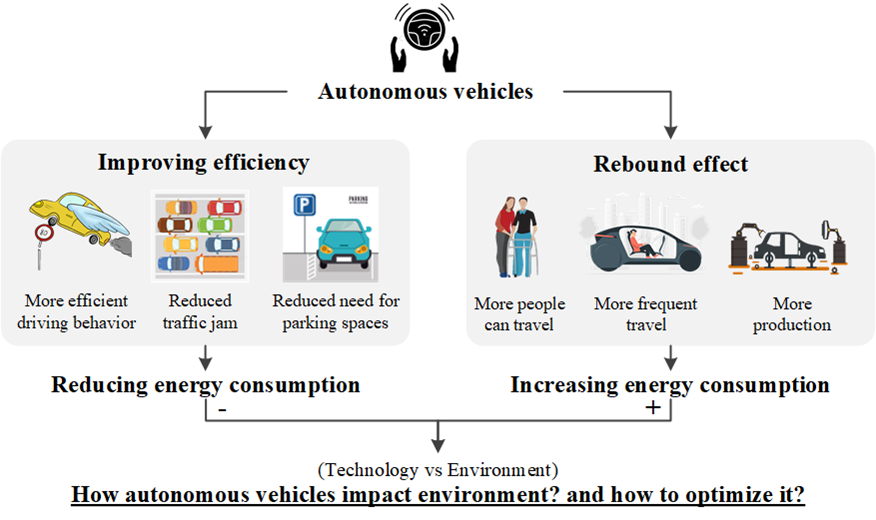
Autonomous vehicles (AVs) are poised to reshape future mobility by improving driving efficiency and reducing congestion, yet their widespread adoption may also intensify energy use and resource demand through rebound effects. To clarify these competing dynamics, my PhD project investigates the long-term environmental implications of AV deployment and identifies pathways to mitigate their negative impacts.
The research is structured in three stages. Stage I develops a system dynamics model to project future travel demand under AV adoption. Stage II constructs a comprehensive environmental life-cycle assessment (ELCA) of Avs, covering manufacturing, operation, and end-of-life phases. Combining travel-demand projections with the ELCA model enables the estimation of future life-cycle burdens and comparison with alternative vehicle technologies. Stage III evaluates mitigation strategies through scenario analysis, testing options such as cleaner manufacturing, improved autonomous-driving energy efficiency, expanded renewable charging, and enhanced battery-recycling policies.
Together, these stages provide an integrated assessment of AVs’ environmental consequences and offer evidence-based strategies to guide sustainable AV development and policymaking.
Supervision by
-
Promotor: Prof. Dr. K.S. (Klaus) Hubacek | Integrated Research on Energy, Environment and Society - IREES | ESRIG, University of Groningen.
-
Co-promotor: Ass. Prof. dr. X. (Xin) Sun | Integrated Research on Energy, Environment and Society - IREES | ESRIG, University of Groningen.
More information and contact details can be found on the personal profile of Yanru Pu.