PhD project: Lateral line based sensing and imaging
Name:
B.J. (Ben) Wolf
Supervisors:
prof. dr. L.R.B. (Lambert) Schomaker
dr. S.M. (Sietse) van Netten
Summary PhD project:
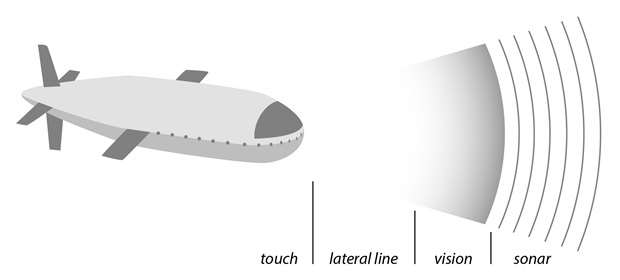
Fish have along the sides of their body a unique organ, the lateral line, which enables them to detect nearby moving objects. This organ is a mechano-receptive system that allows fish to detect perturbations in the water flow surrounding them. It consists of an array of tiny hair-cell like neuromasts which perceive the local fluid velocity. This extra sense, sometimes referred to as svenning, lies somewhere between touch and hearing; touch at a distance. This allows fish to detect prey, predator and obstacles without using their eyes. It can therefore be used in total darkness.

In this project, we aim to model and build artificial neuromasts using novel strain sensing techniques that can perceive local fluid velocity and use these to build a large scale artificial lateral line. New lateral line based algorithms and methods will be developed for artificial lateral line perception.
This cost-effective measurement of the near-field large-scale hydrodynamic situation allows for monitoring cabled ocean observatories, live tracking of fish, fish schools and subsurface traffic in harbors.
| Last modified: | 26 January 2024 4.43 p.m. |