
Sensor noise guides flexible robots
Industrial robots are usually good at doing one pre-programmed job. Getting them to do something else requires a lot of new programming. The ENgineering and TEchnology institute Groningen (ENTEG) wants to develop flexible robots. Hector García de Marina describes how to do so in his PhD thesis.
A series of videos shows a team of small robots moving in different formations on a table. If one robot is pushed aside, the team quickly resumes the formation. The secret of these robots lies in a novel algorithm embedded in their software, which was invented by García de Marina during his time as a PhD student at the University of Groningen. As he is now a postdoc at the École nationale de l'aviation civile (ENAC) in Toulouse, where he is implementing his invention in drones to enable them to fly in formation, his supervisors Bayu Jayawardhana and Ming Cao explain his work.

The robots moving in formation on the experimental table may not look like much, but they will lead a new industrial revolution known in the Netherlands as the Smart Industry. ‘The work was part of the European Union Interreg project SmartBot , a collaboration between Dutch and German research institutes and companies’, says Cao . The aim is for both countries to become competitive manufacturers, thus enabling the reshoring of manufacturing. These smart robots will make production lines more flexible.
‘Hector’s mobile robots form the basis of a future system of flexible industrial robots’, explains Jayawardhana. These are controlled by distributed algorithms, which means there is no central control system. Each robot performs its task according to local information. ‘A big advantage is that it doesn’t matter how many robots work together.’
Solution
To make a group of robots work together, the standard algorithm requires real-time information about their relative positions. Distance sensors can provide this information, but their accuracy is limited , especially in an industrial production environment . ‘This inaccuracy introduces an information discrepancy between pairs of robots and leads to an undesirable motion and the deformation of the whole formation’, says Jayawardhana. This was a problem facing the robotics community worldwide, until García de Marina proposed, proved and demonstrated his solution.
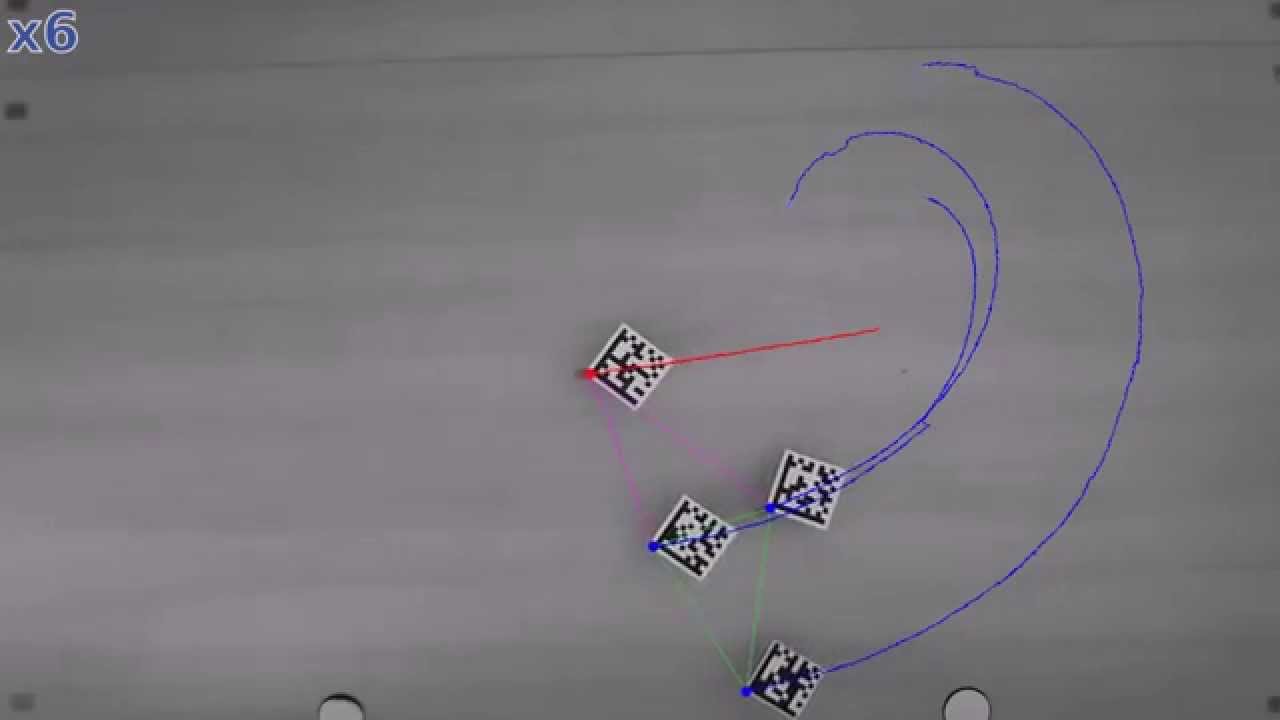
The first part of his PhD project involved understanding how to compensate for the information discrepancy in a group of robots. As García de Marina gained a better understanding of how the information discrepancy influences the dynamics of a group of robots, he discovered how to use it to his own advantage. ‘It turned out that in the standard algorithm you can induce this discrepancy to steer the group of robots in any direction and orientation that you want’, Cao explains. For example, if you introduce a specifically designed artificial sensor noise to a pair of robots, you induce the entire group of robots to move in a circle whose radius is determined by the magnitude of the noise. The elegance of this technique is that there is no need to reprogram all of the robots. ‘The next step is to equip the moving robotic bases with a manipulator arm so that they can do things.’
Smart Industry
Decades ago, the introduction of large and rigid robotic arms revolutionized manufacturing lines. However, in the new era of Smart Industry, the factory of the future needs a new generation of flexible robots that can mass-produce customized products. In this context, García de Marina’s work may provide one of the key enabling technologies for flexible robots. Cao provides an example of a German company that makes part of the tail of an Airbus. ‘Instead of deploying a large, specialized robot to move the large tail part as the company currently does, Hector has shown that it can also be done with three small, smart robots.’ The big advantage is that these small robots can be reassigned to other tasks without extensive reprogramming.
Flexible robots could perform a whole array of tasks ranging from assisting in precision agriculture, filming sports or arts events in 3D, building femtocellular networks for telecommunication to assisting in military operations. ENTEG is at the forefront of the development of flexible robots and works closely with industry in the North Netherlands.
| Last modified: | 29 October 2019 12.52 p.m. |
More news
-
16 April 2024
UG signs Barcelona Declaration on Open Research Information
In a significant stride toward advancing responsible research assessment and open science, the University of Groningen has officially signed the Barcelona Declaration on Open Research Information.
-
02 April 2024
Flying on wood dust
Every two weeks, UG Makers puts the spotlight on a researcher who has created something tangible, ranging from homemade measuring equipment for academic research to small or larger products that can change our daily lives. That is how UG...
-
18 March 2024
VentureLab North helps researchers to develop succesful startups
It has happened to many researchers. While working, you suddenly ask yourself: would this not be incredibly useful for people outside of my own research discipline? There are many ways to share the results of your research. For example, think of a...